

常见问题解答
常见问题解答
相机基础特性
相机基础特性
大阳城集团娱乐游戏3D相机现已发布Dkam系列一共5款产品,该系列跟进应用场景分为消费级和工业级。
消费级产品有:D200
工业级相机根据工作距离与覆盖幅面等区别有:D130S,D102,D130,D100L。
此外,我们支持给客户提供客制化相机的需求。
采购请联系我司业务员或咨询029-81120961。
我司已开通淘宝店铺,可搜索淘宝店铺“西安大阳城集团娱乐游戏”联系客服下单。
大阳城集团娱乐游戏采用面阵动态光栅条纹结构光的方案实现高精度的三维重建。
相比散斑结构光和TOF方案,大阳城集团娱乐游戏的动态时间编码结构光具有更高的精度优势,点云分辨率更高。相较于线激光方案,大阳城集团娱乐游戏3D相机具有成像速度快,一次成像一个面的优势;
相较于DLP方案,都是投射的结构光方案实现三维重建,不过两者投射原理不一样,DLP是用DMD(数字微镜阵列,这个其实也是一种MEMS执行器)实现投影,每个像素是一个镜子,这个镜子只有开关两个状态,光透过去这个像素就有显示,反之不需要的会被吸光材料处理。而我们MEMS Scanning Mirror,是一个连续扫描的芯片,通过对激光束的扫描以及激光束控制(比如亮灭,或者灰度控制)实现投影。我们这种方案的好处在于采用MEMS投影是一个无焦投影的方式,而DMD是有一个投影镜头会有焦距的概念,所以大阳城集团娱乐游戏采用MEMS方案投射的结构光具有景深大的优势。
大阳城集团娱乐游戏3D相机的点云计算过程均在设备内部完成,完全无需占用上位机的计算资源。
注:设备配套的SDK 运行在上位机,需要占用少量的运算和内存资源。
多台相机同时对同一个物体投射结构光时,结构光会存在干扰的情况。大阳城集团娱乐游戏提供3D相机间串联触发拍照的方案,可以避免多相机同时工作带来的干扰。
室内的灯光不会影响大阳城集团娱乐游戏相机的成像效果,太阳光及室外无遮挡棚子的情况下大阳城集团娱乐游戏的3D相机成像质量会受到较大影响。如确需在室外使用,请使用遮光棚遮太阳光。
用3D相机采集平面数据,一次获取约数百万个点的数据,取中间4万个点的深度值拟合一个平面,此时求解的标准差即为精度。在不同距离下测得的标准差即在不同距离下的精度。
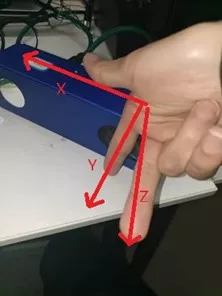
点云坐标原点在红外镜头的光心。点云坐标系遵循右手笛卡尔坐标系,XYZ如图所示。
SDK使用及图像配置
SDK使用及图像配置
大阳城集团娱乐游戏3D相机支持windows和linux两大平台,支持的SDK开发语言有:C++、C、C#、python等。
大阳城集团娱乐游戏全系列3D相机均支持图像与点云的对齐,点云和灰度图像为自动对齐,如果需要对齐RGB:Fusion3DToRGB和FusionImageTo3D都为点云与RGB的对齐API,但它们的对其的基准不一样,Fusion3DToRGB是以RGB为基准重排点云,FusionImageTo3D是以点云为基准重排RGB,如果原始彩色图特征比较好识别的话,我们建议您以RGB为基准重排点云。
Dkam系列相机采用主动探测方式,即自身具备照明,所投光为红外光,光功率为定值,如果想要改变成像效果可通过设定接收端CMOS的曝光值实现。CMOS的像素在曝光时间内采集的光信号,经积分后转变为数字量,相机处理器根据该数字量判断该像素采集光能量是否可以用于计算点云,当该数字量超过设定的阈值且小于饱和量时,该像素采集的光能量有效,计算点云;当该数字量小于设定的阈值或达到饱和量时,该像素采集的光能量无效,不计算点云;达不到阈值在红外图中表现为过暗,达到饱和量在红外图中表现为过亮。
